Project Description
Human eyes are responsible for more than 80 percent of information perception [1]. Ocular motor diseases that affect structures of the eye, such as strabismus and nystagmus, can cause partial or complete loss of vision. To advance research in disorders of the oculomotor system, an eye robot actuated by conductive nylon sewing thread has been built as a model of gaze shifts (figure 1). The nonlinear control problem to be addressed is reposition the center of gaze of a camera to foveate an object of uniform color in the visual environment. Gaze shifts involve visual processing as an image is interpreted and data acquisition as an object’s position changes in the field of view. The change is then measured and responded to.
Project Images
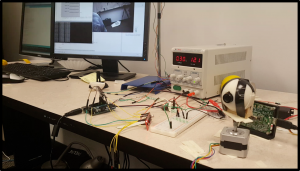
Figure 1. Biologically Inspired Eye Robot.
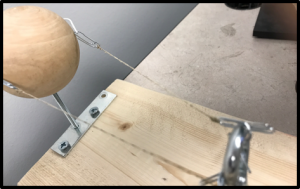
Figure 2. Artificial muscles on platform made for testing.
References
[1] X. Wang, Y. Zhang, X. Fu, and G. Xiang, “Design and Kinematic Analysis of a Novel Humanoid Robot Eye Using Pneumatic Artificial Muscles,” J. Bionic Eng., vol. 5, no. 3, pp. 264–270, 2008.