Eye Robot Model Description
Project Steps
- Develop a motor actuated robot eye to test different control models to execute desired movement
- A Dragonfly camera was incorporated to provide visual feedback to achieve motion tracking with the robot eye
- Control horizontal robot eye movement using conductive nylon sewing thread for actuation
- Help to diagnose, treat, and understand eye movement disorders with gained insights of biomechanics and control of human eye movement in three spatial dimensions
Phase I
Construction of the eye model is a multiphase process and based on the thesis of University of British Columbia student, Martin Lesmana. The first model has been designed as a proof of concept to improve upon Lesmana’s design of a nonlinear control algorithm to rotate a motor to imitate eye movement [1]. The model (figure 1) includes a SparkFun Mercury stepper motor and driver, an Arduino Uno R3, a Point Grey Dragonfly®2, and an adjustable digital DC power supply. The stepper motor is used to rotate the camera and a nonlinear control algorithm has been built for object tracking. An object of uniform color and its location in the camera’s field of view is recognized, and as the object’s horizontal position changes, the change in distance is calculated and sent from the microcontroller to the stepper motor to turn the camera so that the center of gaze is back on the object. After its proven ability to track an object in real-time, the second phase will involve the removal and replacement of the stepper motor with artificial muscles.
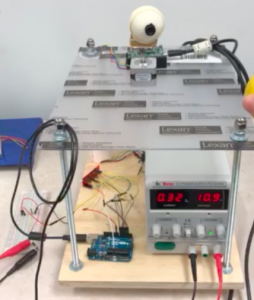
Figure 1. Initial eye robot model.
Phase II
The stepper motor and shaft used to hold the eye has been replaced with an artificial muscle pair (figure 2). Polymer fibers with similar mechanical properties as human extraocular muscles will perform as an actuator to provide insight into extraocular muscle function during visual processes and generate rotational movement of the eye shell holding the camera. The artificial muscle material chosen for this application comprises of a two-ply, coiled, silver-plated, 180-mm-diameter nylon fiber (V Technical Textiles, Inc.). Electrical stimulation to the conductive fiber will allow for contraction of the artificial muscle through a process called thermal expansion. The conductive yarn generates torsional and tensile actuation when powered electrothermally. In this second phase, a signal will be sent to a Progressive Automations LC-201 4 Channel Relay Module to perform as a pulse width modulator as the time in which the voltage supply to the muscle is varied for different response behaviors of the muscle. The electro-mechanical robot eye will provide a model to help further academic research into coordinated eye movement.
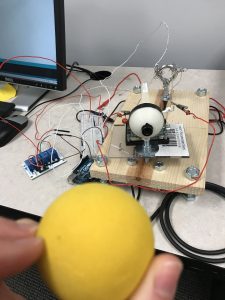
Figure 2. Second phase of eye robot model.
References
[1] M. Lesmana “Biologically Motivated Controllers for Robotic Eyes”, University of British Columbia, pp.28, Aug. 2011.