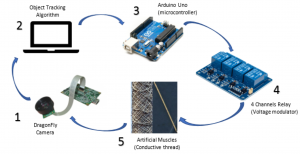
A lot has happened with the construction of our eye-bot! A fidget spinner will be used as a “frictionless” platform for the eyeball to sit. This is important because the weight of the motion tracking system must not affect the mechanism of contraction of the muscle fibers. On sliding door rolling assembly replacements behind the eye is part of the motion tracking system.
It is important to note the material chosen for the muscles and why. Silver plated nylon, a commercially-available high conductive twisted yarn was chosen for the following reasons [1]:
- reversible–fiber-direction thermal contraction
- large volumetric thermal expansion
- large anisotropy in thermally induced dimension changes

References
[1] C. S. Haines et al., “Artificial muscles from fishing line and sewing thread,” Science (80-. )., vol. 343, no. 6173, pp. 868–872, 2014.



 Posted by qokelly
Posted by qokelly