Over the past semester, we have worked on a number of important steps with our eye model project. Here is an illustration of the design setup:
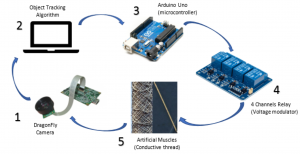
Construction of the eye model has been a multiphase process. To date, we have replaced the stepper motor with a customized pair of artificial muscles and a 4 Channel Relay Module (for more information please see the Eye Robot Model Description page). By modulating the time of voltage supply, the muscles respond differently and function antagonistically to move the eye to track an object. The system foveates when the camera remains centered on the object.
The steps of the process are listed below:
- Image acquisition
- Object tracking algorithm detects and tracks object
- Arduino receives location of the object from motion tracking algorithm
- Arduino with 4 Channel Relay Module uses muscle characterization function to supply and modulate output voltage to muscles
- Conductive nylon sewing thread used to actuate robot eye and mimic extraocular muscle contraction and relaxation
- Artificial muscles contract when voltage is applied allowing the camera to move and follow an object
- Relay provides voltage when object moving and stops voltage supply when the object is foveated
Leave a Reply